OGBench: Offline Goal-Conditioned RL Before Real-Robot Complexity
OGBench is a benchmark for offline goal-conditioned reinforcement learning. The paper is useful because it separates several algorithmic challenges that are often mixed together: stitching behavior from offline data, long-horizon reasoning, stochastic control, and learning from high-dimensional observations.
What the Paper Contributes
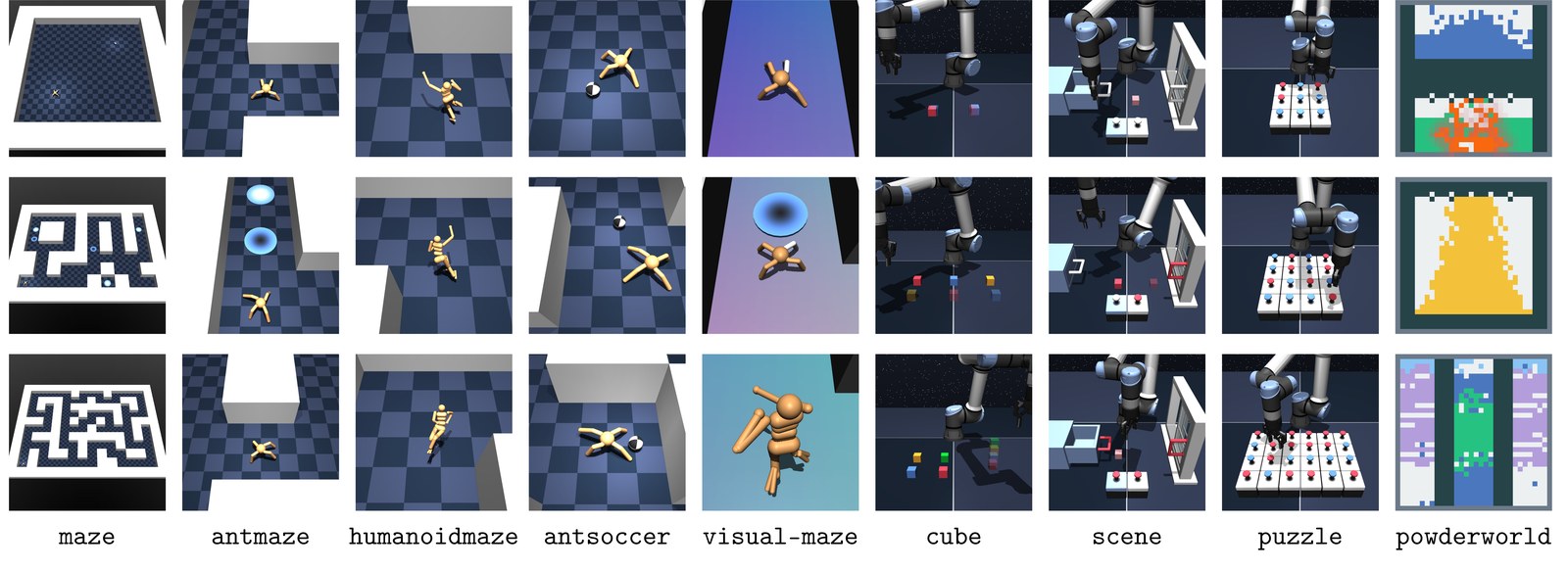
OGBench focuses on fixed-dataset learning, where the policy cannot collect new experience online. Its task families include:
| Family | Typical use |
|---|---|
| Locomotion | Navigation, stitching, long-horizon goal reaching |
| Manipulation | Object control, puzzle-like goals, sequential state changes |
| Drawing | Structured state transitions and goal-conditioned behavior |
The paper emphasizes that offline goal-conditioned RL is not just “offline RL with a goal vector.” A method may need to infer useful intermediate behavior from the dataset, stitch partial trajectories, and reason over long horizons without fresh exploration.
How to Use It
The official-style API usually creates both an environment and datasets:
import ogbench
env, train_dataset, val_dataset = ogbench.make_env_and_datasets(
"pointmaze-medium-navigate-v0",
compact_dataset=True,
)
obs, info = env.reset(options={"task_id": 1, "render_goal": True})
next_obs, reward, terminated, truncated, info = env.step(env.action_space.sample())
env.close()
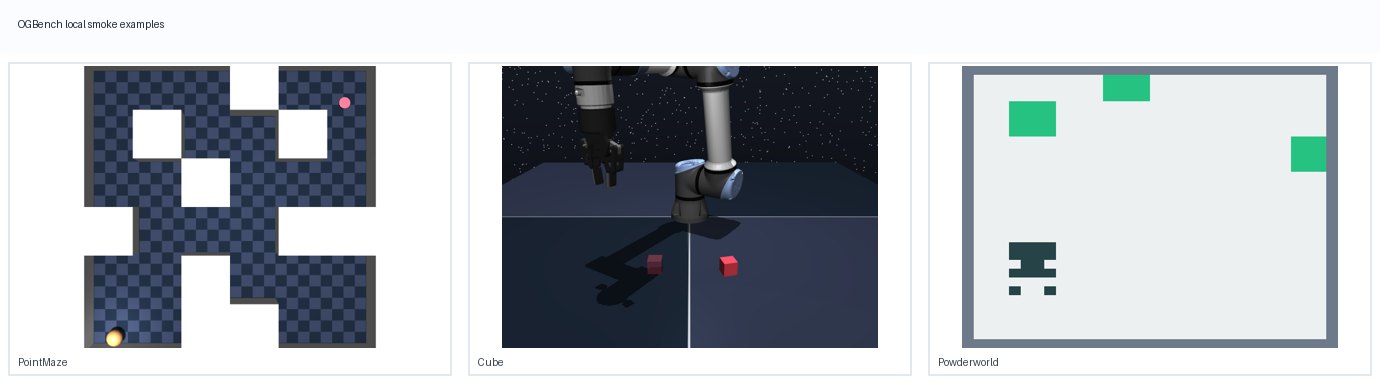
For manipulation work, start with an environment-only smoke before downloading large datasets. Then inspect observation/action shapes, goal fields, dataset keys, and evaluation horizons.
Practical Usage Notes
OGBench is attractive because it is easy to start small, but it can become expensive quickly if pixel or large-scale datasets are downloaded without a plan. A practical workflow is to start with the official environment-and-dataset API, then use an environment-only smoke before touching full datasets.
My practical checklist:
- create the environment through the official OGBench API instead of bypassing registration;
- start with a small state dataset and compact loading before moving to pixel data;
- record the exact environment name, dataset variant, observation keys, goal fields, and horizon;
- keep dataset size and storage location visible in the experiment log;
- separate algorithmic offline-RL claims from real-robot or VLA generalization claims.
For replanning or goal-conditioned policies, OGBench is most useful when the result includes trajectory-level analysis. A final return number is less informative than showing whether the policy can stitch partial behavior, recover from a bad intermediate state, or reach a goal that is underrepresented in the dataset.
When To Use It
Use OGBench when the method is about offline learning, goal-conditioned action selection, latent planning, replay-buffer composition, action correction, or algorithmic ablation. It gives faster feedback than a full VLA stack and has cleaner failure modes than real robot data.
It is also a good first filter for replanning ideas. If an idea cannot help in a controlled offline goal-reaching benchmark, it is unlikely to become reliable after adding language, vision encoders, and real robot noise.
Limits
OGBench does not prove language understanding, hardware deployment, or real-world VLA generalization. Treat it as a mechanism benchmark for offline goal-conditioned learning.
Paper Source
This note was revised from the paper and its LaTeX source package: OGBench: Benchmarking Offline Goal-Conditioned RL.