DROID: Real-Robot Data for Vision-Language-Action Research
DROID is a large in-the-wild robot manipulation dataset. The paper is useful because it shifts the discussion from small lab datasets toward scene diversity, task diversity, and a shared open-source robot setup.

What the Paper Contributes
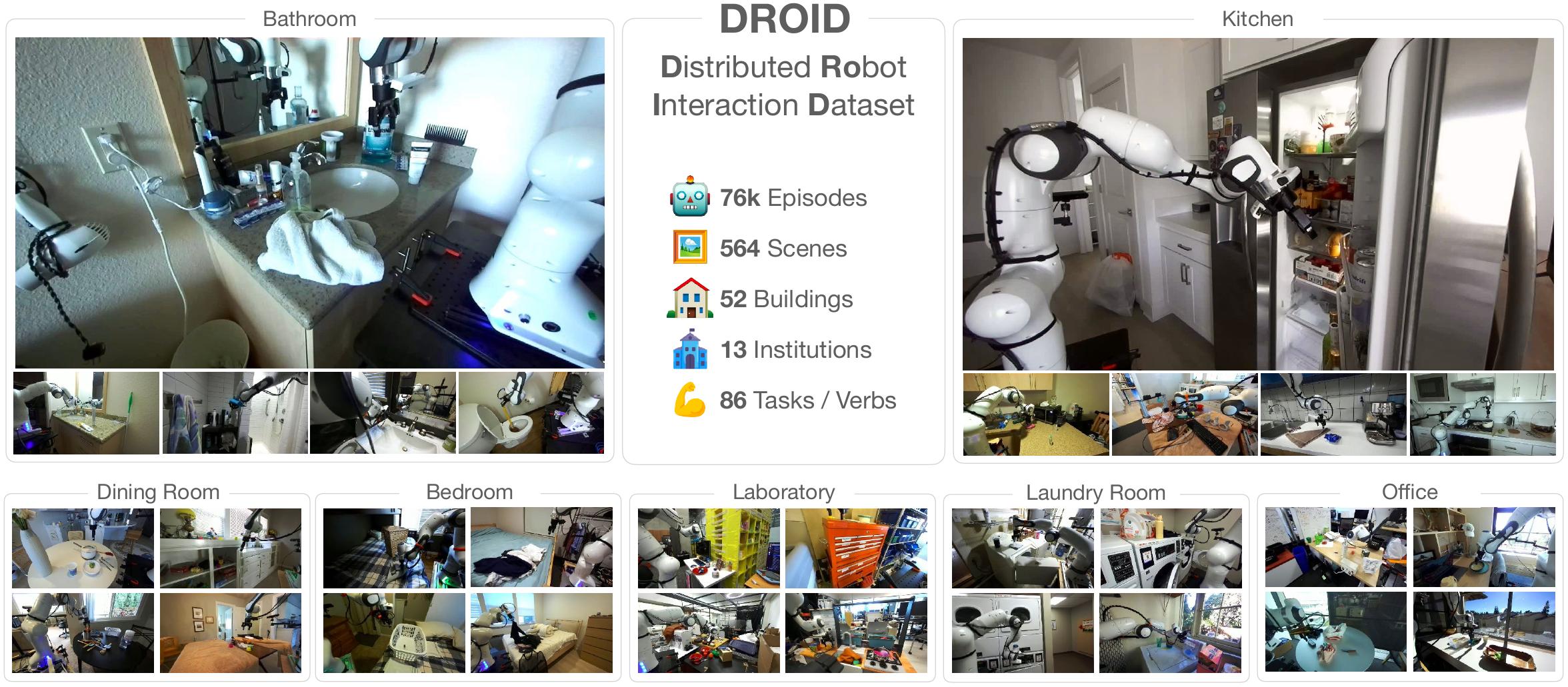
The paper introduces a dataset of 76k successful robot demonstration trajectories, about 350 hours of interaction data, 564 scenes, 86 tasks, and 52 buildings collected over 12 months. Each episode includes synchronized RGB streams, calibration information, depth information, language instructions, state, action, and metadata.
This makes DROID especially relevant for VLA research. It is not just a file format; it is a data collection protocol meant to create more diverse real-world robot experience.
What It Is Good For
DROID is useful when the research question involves:
- VLA fine-tuning;
- offline imitation learning;
- action prediction from visual observations;
- real-world data diversity;
- robustness and generalization studies grounded in robot demonstrations.
Compared with a simulated benchmark, the important shift is that the observations and actions come from real robot operation in varied scenes. That makes the data more relevant for deployment-oriented claims, even when the evaluation remains offline.
How to Use It
The usual workflow is data-centric:
load episode -> inspect cameras/state/actions -> train or evaluate policy -> compare predicted and recorded behavior
Before training on a large subset, inspect a few episodes visually. Confirm camera conventions, action dimensions, language fields, timestamp alignment, and normalization. These details often matter more than model architecture during the first week of work.
Practical Usage Notes
The guide-level recommendation is to treat DROID as real-world robot data first and a closed-loop benchmark only when the matching hardware and deployment protocol are actually available. A sample, a model checkpoint, or a partial data mirror is enough for offline analysis, but not enough to claim closed-loop real-robot performance.
Useful first checks:
- inspect a few episodes before batching over the dataset;
- verify camera streams, action dimensions, language fields, timestamps, and calibration metadata;
- start with offline action prediction or imitation-learning diagnostics before claiming deployment;
- document whether the full dataset, a curated subset, or a small sample is used;
- avoid mixing simulated benchmark claims with real-world data claims in one aggregate number.
For VLA research, DROID is strongest as a bridge between controlled benchmarks and real robot trajectories. It can reveal whether a policy interface survives real camera streams and real action distributions, but it does not remove the need for controlled ablations elsewhere.
What It Does Not Automatically Provide
Having DROID data does not mean you have a closed-loop real-robot benchmark. Closed-loop evaluation requires compatible robot hardware, control software, safety handling, and a deployment protocol.
It also does not replace controlled simulation. If you need quick ablations, OGBench, LIBERO, or RoboSuite-style environments may still be the better first step.
DROID Versus OGBench
A practical way to choose:
| If the question is… | Start with… |
|---|---|
| Does my offline RL or replanning mechanism work? | OGBench |
| Does my VLA policy handle real robot trajectories? | DROID |
| Does my method transfer from controlled sim to real data? | Use both |
For many projects, the best sequence is OGBench first for algorithmic feedback, then DROID for real-world trajectory relevance.
Paper Source
This note was revised from the paper and its LaTeX source package: DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset.