Habitat: Navigation Benchmarks for Embodied Feedback and Replanning
Habitat is a simulation platform for embodied AI. The original paper is important because it separates the embodied-agent stack into datasets, simulators, and tasks, then provides a unified API and a high-performance simulator for navigation-style evaluation.
What the Paper Contributes
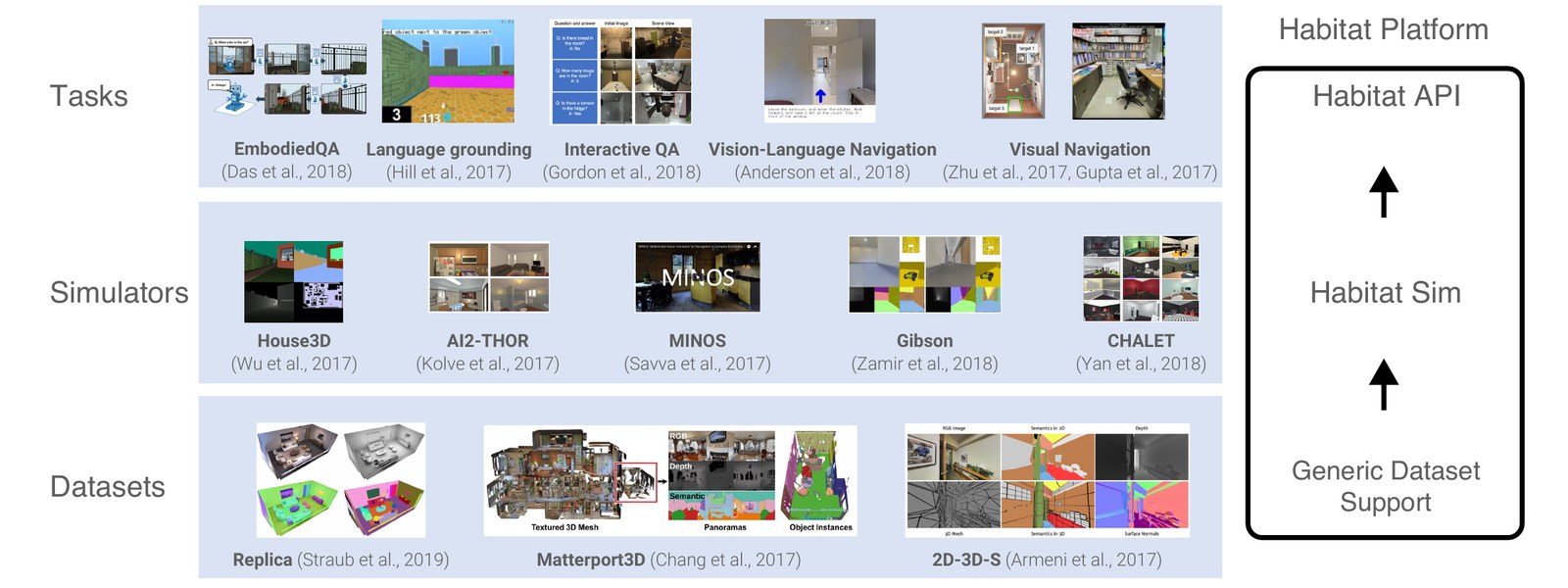
The paper presents Habitat as a platform rather than a single task. Its stack includes:
| Layer | Role |
|---|---|
| Datasets | 3D environments and episode definitions |
| Simulator | Fast embodied rendering and agent interaction |
| Tasks | Navigation and embodied-agent objectives |
This design is why Habitat became common for PointNav, ObjectNav, and related embodied navigation tasks. It gives researchers a consistent place to evaluate observation-driven planning and control.
What Habitat Tests
PointNav asks an agent to reach a target position. ObjectNav asks an agent to find an object category or instance. Both tasks stress navigation under partial observability, map building, sensor input, motion execution, and decision making under uncertainty.
For replanning research, the important question is not only “can the shortest path be followed?” It is “what happens when the plan is incomplete, noisy, over-budget, or invalid after new observations?”
How to Use It
The workflow normally looks like:
choose task config -> reset episode -> run policy/planner loop -> log trajectory metrics
For replanning experiments, make the replan budget explicit. Record how often the agent replans, what context it uses, and whether replanning improves success or only adds computation.
Practical Usage Notes
For replanning work, Habitat is often most useful as a navigation substrate, especially around PointNav-style evaluation. That is a narrower and cleaner use than claiming broad Habitat coverage across every task family.
For replanning papers, I would report:
- task family, dataset split, episode count, and executor setting;
- success, SPL, path length, collision or cost signals, and timeout rate;
- number of replans, replan trigger, context window, and planning budget;
- latency or token budget when a large model is part of the loop;
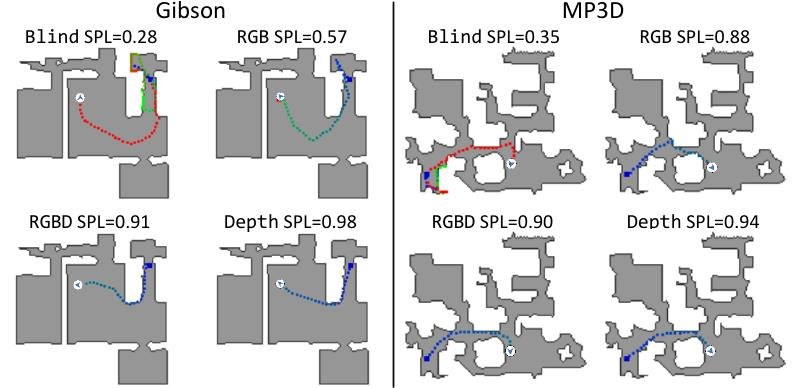
- representative top-down maps or trajectory visualizations.
The important failure mode is budget waste. A replan module can improve final success while making the agent too slow or too expensive. Habitat is useful because it lets the result be read as a closed-loop trajectory, not just a final answer.
When To Use It
Use Habitat when a project needs:
- embodied navigation;
- feedback-sensitive planning;
- budgeted or repeated replanning;
- visual or geometric partial observability;
- trajectory-level metrics such as success, path length, SPL, or cost.
It is particularly useful when the agent is more than a controller but not necessarily a manipulator. A model can be evaluated as a planner, executor, or replanning module inside a closed-loop navigation setting.
Limits
Habitat is not primarily a tabletop manipulation benchmark. If the claim is about grasping, fixture interaction, or object placement, a benchmark such as LIBERO, RoboSuite, RoboCasa, or ManiSkill is usually more direct.
Paper Source
This note was revised from the paper and its LaTeX source package: Habitat: A Platform for Embodied AI Research.