Generative Simulation for Robot Learning
Robot learning has a data problem. Real-world data is valuable, but collecting it is slow, expensive, and hard to scale. Simulation is faster and safer, but hand-building simulated tasks, scenes, objects, rewards, and demonstrations can become another bottleneck.
Generative simulation asks a different question: can foundation models help generate the training problems themselves?
RoboGen is a clear example of this direction. Instead of using large models only as planners or policy backbones, RoboGen uses them to propose tasks, generate scenes, create training supervision, and drive skill learning inside simulation. The goal is not to replace real-world data. The goal is to create a scalable engine for producing diverse practice.
Why Traditional Simulation Does Not Scale Easily
Simulation is attractive because it can run faster than the real world, generate failures safely, and provide privileged state information. But traditional simulation has its own scaling limits.
Someone still needs to design:
- the task distribution;
- the objects and scene layouts;
- the initial and goal states;
- the reward or success condition;
- the controller interface;
- the curriculum;
- the evaluation protocol.
For one benchmark, this is manageable. For thousands of long-tail everyday skills, it becomes expensive. A robot that should manipulate doors, drawers, containers, appliances, tools, cloth, food, toys, and furniture cannot rely only on a few manually curated tasks.
Generative simulation tries to automate parts of that design work.
The RoboGen Loop
The RoboGen pipeline can be understood as a propose-generate-learn cycle:
- Task proposal. A model suggests tasks that are interesting, diverse, or useful for a robot to learn.
- Scene generation. The system constructs a simulated environment with relevant objects, spatial layouts, and physical assets.
- Training supervision generation. The task is decomposed into subgoals, constraints, rewards, or motion supervision.
- Skill learning. The robot learns a policy using reinforcement learning, motion planning, trajectory optimization, or other training tools.
This loop changes the role of a foundation model. It is not just answering “what should the robot do now?” It is helping create the world in which the robot practices.
What Is Actually Generated?
The word “generative” can mean several different things. In this setting, it is not only image generation. A useful robot training problem may require:
- a language description of the task;
- a list of relevant objects;
- object placements and scene geometry;
- a sequence of subgoals;
- success checks;
- reward functions;
- motion constraints;
- demonstrations or reference trajectories;
- curriculum variants.
This is why generative simulation is interesting. It combines semantic generation with physical simulation. The generated content must not only look plausible; it must define a learnable embodied task.
Why This Matters for Robot Learning
Generative simulation can help in three ways.
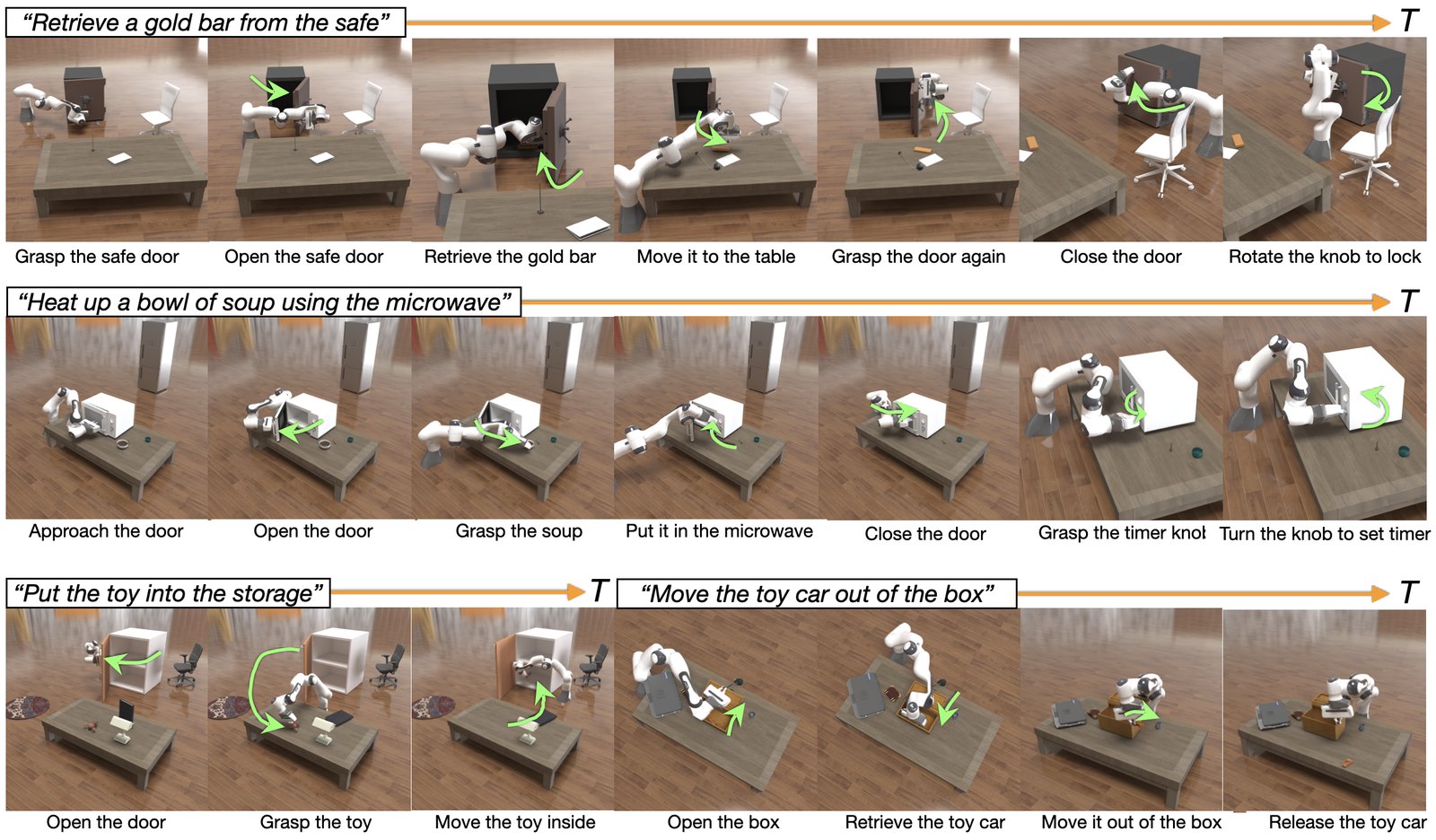
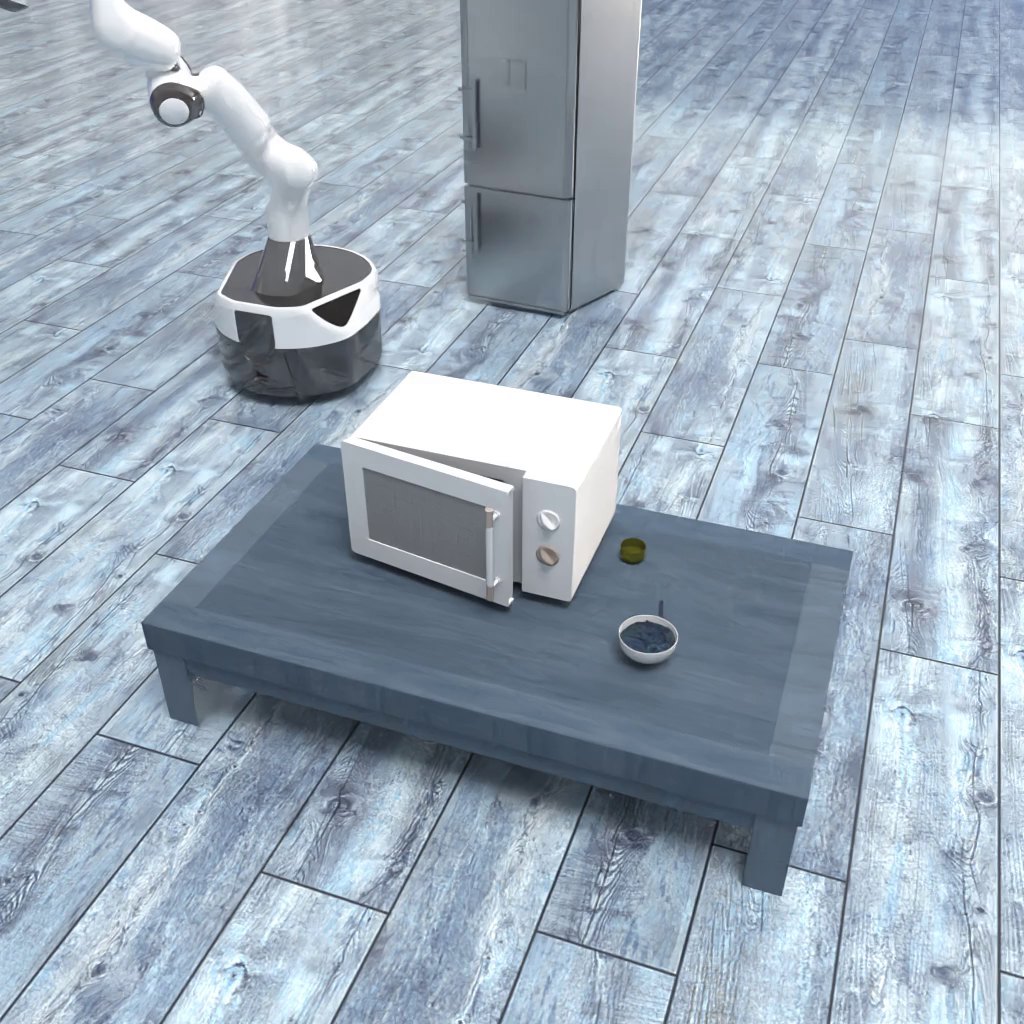
First, it can increase task diversity. Instead of hand-authoring a small set of manipulation tasks, a system can propose many variants: opening containers, storing objects, retrieving items, using appliances, or interacting with articulated objects.
Second, it can improve curriculum design. A robot can start with easier subskills and gradually train on harder long-horizon tasks. If a task is too difficult, the generator can produce simpler variants.
Third, it can create failure-rich practice. Real robots cannot safely or cheaply try every bad strategy. Simulation can expose policies to rare contacts, awkward initial states, and recovery situations.
This is especially relevant for long-horizon behavior. A robot may need to combine navigation, reaching, grasping, opening, placing, and checking. Manually writing every training scenario is not sustainable.
The Sim-to-Real Caveat
Generative simulation does not remove the sim-to-real problem. A policy can still overfit to simulation artifacts: unrealistic textures, simplified contacts, missing sensor noise, idealized object properties, or reward shortcuts.
The important question is whether generative simulation can make simulation broader, not perfect. If the generated tasks cover more objects, layouts, goals, and physical variations, then the trained policy may become less brittle before it ever touches a real robot.
Useful generative simulation therefore needs grounding:
- realistic physical assets;
- meaningful task constraints;
- diverse but plausible object placements;
- validation that generated tasks are actually solvable;
- evaluation against real-world or high-fidelity benchmarks.
The generator should be creative, but the simulator must remain honest.
A Useful Mental Model
Think of generative simulation as a data engine:
| Component | Role |
|---|---|
| Foundation model | Proposes tasks, objects, subgoals, and supervision. |
| Simulator | Enforces geometry, physics, contacts, and dynamics. |
| Planner or optimizer | Produces feasible references or training signals. |
| Policy learner | Turns generated practice into executable behavior. |
| Evaluator | Rejects invalid tasks and measures skill acquisition. |
The strength of the system comes from the loop, not any single component.
What To Watch Next
This direction raises several research questions:
- How do we measure the quality of generated robot tasks?
- How do we prevent generated rewards from becoming shortcuts?
- How do we decide which generated skills are worth learning?
- How do we combine generated simulation data with real robot data?
- How do we validate that a generated curriculum improves deployment, not just benchmark scores?
Generative simulation is promising because it attacks a real bottleneck: the shortage of diverse, structured, physically grounded training problems. The long-term value will depend on whether these generated worlds teach robots skills that transfer beyond the simulator.